The performance of ultrasonic non-destructive evaluation (NDE) systems is frequently limited by backscattering and electronic noise, which reduce sensitivity and resolution, particularly in industrial environments. At the Metals Industry Development Institute in Ethiopia, the ultrasonic NDT flaw detector (model UFD-01/T) has been employed to defects internal material defects. However, accurately pinpointing crack related frequencies remains difficult due to substantial environmental noise interference. To address this challenge, a post-processing noise cancellation system was developed utilizing advanced adaptive filtering techniques. This study presents mathematical models for noise reduction and evaluates the effectiveness of several adaptive filter algorithms, including Fast Fourier Transform (FFT), Finite Impulse Response (FIR), Infinite Impulse Response (IIR), and Least Mean Square (LMS) methods. These algorithms were implemented and simulated within the MATLAB environment to assess their ability to isolate defect signals from noise. Simulation results demonstrate that the proposed adaptive filtering methods, particularly the LMS algorithm, effectively attenuate high-frequency noise originating from echoes and environmental interferences. Consequently, the noise floor in the processed ultrasonic signals was reduced to below 35 dBm, significantly enhancing the capability to localize material defects. These findings support the integration of adaptive filtering techniques in ultrasonic NDE systems to improve defect detection precision in noisy industrial environments, thereby enhancing inspection reliability, reducing false positives, and contributing to the overall safety and efficiency of industrial operations.
| Published in | Journal of Electrical and Electronic Engineering (Volume 13, Issue 4) |
| DOI | 10.11648/j.jeee.20251304.13 |
| Page(s) | 168-183 |
| Creative Commons |
This is an Open Access article, distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution and reproduction in any medium or format, provided the original work is properly cited. |
| Copyright |
Copyright © The Author(s), 2025. Published by Science Publishing Group |
NDE, Noise Cancellation, Adaptive Filtering, FFT, Simulation
NDE | Non-Destructive Evaluation |
NDT | Non-Destructive Testing |
UFD | Ultrasonic Flaw Detection |
FFT | Fast Fourier Transform |
FIR | Finite Impulse Response |
IIR | Infinite Impulse Response |
LMS | Least Mean Square |
FPGA | Ultrasonic Signal Processing Platform |
RTL | Register Transfer Level |
DLMS | Delayed Least Mean Square |
RLS | Recursive Least Squares |
NLMS | Normalized Least Mean Square |
BMI | Body Mass Index |
UV | Ultraviolet |
HV | Vickers Hardness |
HS | Shrinkage According Height |
DS | Shrinkage According Diameter |
| [1] | G. V. P. Chandra, S. Yadav, B. A. Krishna, and M. Kamaraju, “Performance of Wiener Filter and Adaptive Filter for Noise Cancellation in Real-Time Environment,” Int. J. Comput. Appl., vol. 97, no. 15, 2014. |
| [2] | B. A. Krishna and G. C. S. Yadav, “Performance Comparison of Different Variable Filters for Noise Cancellation in Real-Time Environment,” Int. J. Signal Process. Image Process. Pattern Recognit., vol. 9, no. 2, pp. 107-126, 2016. |
| [3] | G. C. S. Yadav and B. A. Krishna, “Study of different adaptive filter algorithms for noise cancellation in real-Time environment,” Int. J. Comput. Appl., vol. 96, no. 10, 2014. |
| [4] | Y.-H. Chen, S.-J. Ruan, and T. Qi, “An automotive application of real-time adaptive wiener filter for non-stationary noise cancellation in a car environment,” in 2012 IEEE International Conference on Signal Processing, Communication and Computing (ICSPCC 2012), 2012, pp. 597-601. |
| [5] | H. Kaur and R. Talwar, “Performance and convergence analysis of LMS algorithm,” in 2012 IEEE International Conference on Computational Intelligence and Computing Research, 2012, pp. 1-4. |
| [6] | H.-C. Huang and J. Lee, “A new variable step-size NLMS algorithm and its performance analysis,” IEEE Trans. Signal Process., vol. 60, no. 4, pp. 2055-2060, 2011. |
| [7] | C. Brady, J. Arbona, I. S. Ahn, and Y. Lu, “FPGA-based adaptive noise cancellation for ultrasonic NDE application,” in 2012 IEEE International Conference on Electro/Information Technology, 2012, pp. 1-5. |
| [8] | R. Jose and M. Brindha, “Area Optimized Adaptive Noise Cancellation System Using FPGA for Ultrasonic NDE Applications: A Design and Simulation Approach,” Signal Process., vol. 5, p. 11. |
| [9] | U. Meyer-Baese and U. Meyer-Baese, Digital signal processing with field programmable gate arrays, vol. 65. Springer, 2007. |
| [10] | K. A. Tiwari, R. Raisutis, and V. Samaitis, “Signal processing methods to improve the Signal-to-noise ratio (SNR) in ultrasonic non-destructive testing of wind turbine blade,” Procedia Struct. Integr., vol. 5, pp. 1184-1191, 2017. |
| [11] | R. Drai, F. Sellidj, M. Khelil, and A. Benchaala, “Elaboration of some signal processing algorithms in ultrasonic techniques: application to materials NDT,” Ultrasonics, vol. 38, no. 1-8, pp. 503-507, 2000. |
| [12] | K. A. Tiwari, A. Ostreika, and J. Platuziene, “Efficient FPGA-based FIR- architecture and its significance in ultrasonic signal processing,” J. Vibroengineering, vol. 19, no. 8, pp. 6423-6432, 2017. |
| [13] | J. E. González, E. F. Forero, and D. A. Tibaduiza, “Signal Denoising by Using Adaptive Filtering in Signals from Ultrasonic Sensors.” |
| [14] | M. Li and G. Hayward, “A robust approach to optimal matched filter design in ultrasonic non-destructive evaluation (NDE),” in AIP Conference Proceedings, 2017, vol. 1806, no. 1, p. 140002. |
| [15] | P. M. Shankar, P. Karpur, V. L. Newhouse, and J. L. Rose, “Split-spectrum processing: Analysis of polarity threshold algorithm for improvement of signal-to-noise ratio and detectability in ultrasonic signals,” IEEE Trans. Ultrason. Ferroelectr. Freq. Control, vol. 36, no. 1, pp. 101-108, 1989. |
| [16] | R. Mallett, P. J. Mudge, T. H. Gan, and W. Balachandra, “Analysis of cross- correlation and wavelet de-noising for the reduction of the effects of dispersion in long- range ultrasonic testing,” Insight-Non-Destr. Test. Cond. Monit., vol. 49, no. 6, pp. 350- 355, 2007. |
| [17] | S. Iyer, S. K. Sinha, B. R. Tittmann, and M. K. Pedrick, “Ultrasonic signal processing methods for detection of defects in concrete pipes,” Autom. Constr., vol. 22, pp. 135-148, 2012. |
| [18] | Vengrinovich, V. (2013) New Trends in Non-Destructive Evaluation of Surface Hardened Layers and Coatings. Journal of Surface Engineered Materials and Advanced Technology, 3, 154-162. |
| [19] | Karaseva, V., Lvov, A. and Rodionov, A. (2023) Frequency-Domain Wideband Acoustic Noise Cancellation System. Journal of Applied Mathematics and Physics, 11, 2523-2532. |
APA Style
Yenealem, B., Genetu, M., Mamushet, E. (2025). Applications of Adaptive Filtering Techniques for Noise Cancellation Systems to the Ultrasonic Non-Destructive Evaluation (NDE). Journal of Electrical and Electronic Engineering, 13(4), 168-183. https://doi.org/10.11648/j.jeee.20251304.13
ACS Style
Yenealem, B.; Genetu, M.; Mamushet, E. Applications of Adaptive Filtering Techniques for Noise Cancellation Systems to the Ultrasonic Non-Destructive Evaluation (NDE). J. Electr. Electron. Eng. 2025, 13(4), 168-183. doi: 10.11648/j.jeee.20251304.13
AMA Style
Yenealem B, Genetu M, Mamushet E. Applications of Adaptive Filtering Techniques for Noise Cancellation Systems to the Ultrasonic Non-Destructive Evaluation (NDE). J Electr Electron Eng. 2025;13(4):168-183. doi: 10.11648/j.jeee.20251304.13
@article{10.11648/j.jeee.20251304.13,
author = {Birtukan Yenealem and Mamaru Genetu and Elias Mamushet},
title = {Applications of Adaptive Filtering Techniques for Noise Cancellation Systems to the Ultrasonic Non-Destructive Evaluation (NDE)
},
journal = {Journal of Electrical and Electronic Engineering},
volume = {13},
number = {4},
pages = {168-183},
doi = {10.11648/j.jeee.20251304.13},
url = {https://doi.org/10.11648/j.jeee.20251304.13},
eprint = {https://article.sciencepublishinggroup.com/pdf/10.11648.j.jeee.20251304.13},
abstract = {The performance of ultrasonic non-destructive evaluation (NDE) systems is frequently limited by backscattering and electronic noise, which reduce sensitivity and resolution, particularly in industrial environments. At the Metals Industry Development Institute in Ethiopia, the ultrasonic NDT flaw detector (model UFD-01/T) has been employed to defects internal material defects. However, accurately pinpointing crack related frequencies remains difficult due to substantial environmental noise interference. To address this challenge, a post-processing noise cancellation system was developed utilizing advanced adaptive filtering techniques. This study presents mathematical models for noise reduction and evaluates the effectiveness of several adaptive filter algorithms, including Fast Fourier Transform (FFT), Finite Impulse Response (FIR), Infinite Impulse Response (IIR), and Least Mean Square (LMS) methods. These algorithms were implemented and simulated within the MATLAB environment to assess their ability to isolate defect signals from noise. Simulation results demonstrate that the proposed adaptive filtering methods, particularly the LMS algorithm, effectively attenuate high-frequency noise originating from echoes and environmental interferences. Consequently, the noise floor in the processed ultrasonic signals was reduced to below 35 dBm, significantly enhancing the capability to localize material defects. These findings support the integration of adaptive filtering techniques in ultrasonic NDE systems to improve defect detection precision in noisy industrial environments, thereby enhancing inspection reliability, reducing false positives, and contributing to the overall safety and efficiency of industrial operations.},
year = {2025}
}
TY - JOUR T1 - Applications of Adaptive Filtering Techniques for Noise Cancellation Systems to the Ultrasonic Non-Destructive Evaluation (NDE) AU - Birtukan Yenealem AU - Mamaru Genetu AU - Elias Mamushet Y1 - 2025/07/28 PY - 2025 N1 - https://doi.org/10.11648/j.jeee.20251304.13 DO - 10.11648/j.jeee.20251304.13 T2 - Journal of Electrical and Electronic Engineering JF - Journal of Electrical and Electronic Engineering JO - Journal of Electrical and Electronic Engineering SP - 168 EP - 183 PB - Science Publishing Group SN - 2329-1605 UR - https://doi.org/10.11648/j.jeee.20251304.13 AB - The performance of ultrasonic non-destructive evaluation (NDE) systems is frequently limited by backscattering and electronic noise, which reduce sensitivity and resolution, particularly in industrial environments. At the Metals Industry Development Institute in Ethiopia, the ultrasonic NDT flaw detector (model UFD-01/T) has been employed to defects internal material defects. However, accurately pinpointing crack related frequencies remains difficult due to substantial environmental noise interference. To address this challenge, a post-processing noise cancellation system was developed utilizing advanced adaptive filtering techniques. This study presents mathematical models for noise reduction and evaluates the effectiveness of several adaptive filter algorithms, including Fast Fourier Transform (FFT), Finite Impulse Response (FIR), Infinite Impulse Response (IIR), and Least Mean Square (LMS) methods. These algorithms were implemented and simulated within the MATLAB environment to assess their ability to isolate defect signals from noise. Simulation results demonstrate that the proposed adaptive filtering methods, particularly the LMS algorithm, effectively attenuate high-frequency noise originating from echoes and environmental interferences. Consequently, the noise floor in the processed ultrasonic signals was reduced to below 35 dBm, significantly enhancing the capability to localize material defects. These findings support the integration of adaptive filtering techniques in ultrasonic NDE systems to improve defect detection precision in noisy industrial environments, thereby enhancing inspection reliability, reducing false positives, and contributing to the overall safety and efficiency of industrial operations. VL - 13 IS - 4 ER -
Minerals Industry Development Institute, Ministry of Mines, Addis Ababa, Ethiopia. Department of Electromechanical Engineering, Addis Ababa Science and Technology University, Addis Ababa, Ethiopia
Minerals Industry Development Institute, Ministry of Mines, Addis Ababa, Ethiopia
Department of Mining Engineering, Addis Ababa Science and Technology University, Addis Ababa, Ethiopia
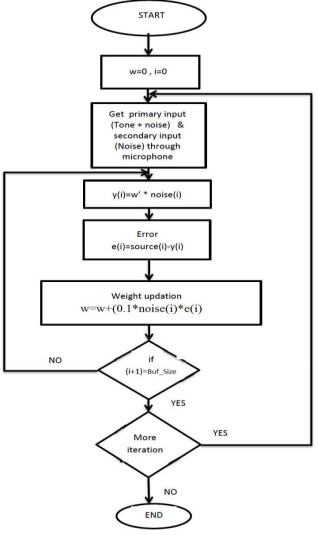
Figure 1. Flow chart of adaptive noise canceller.
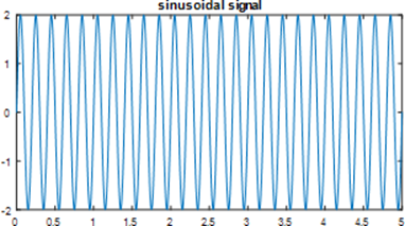
Figure 2. Original sinusoidal Signals.
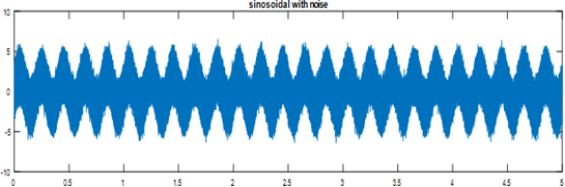
Figure 3. Simulation result of sinusoidal signal with noise.
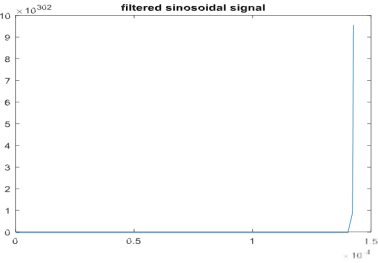
Figure 4. Filtered sinusoidal signal.
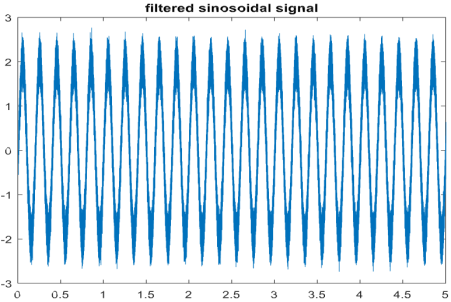
Figure 5. Filtered sinusoidal signal.
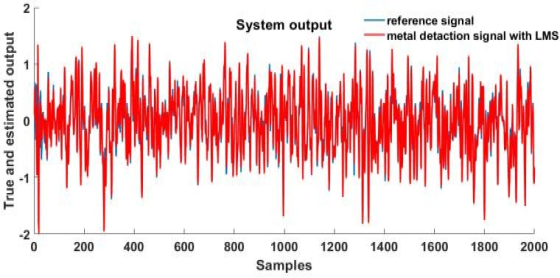
Figure 6. Outputs with Least Mean Square (LMS) filtering technique.
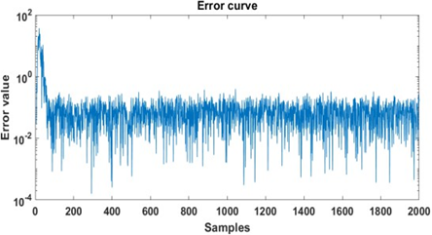
Figure 7. Errors with LMS.
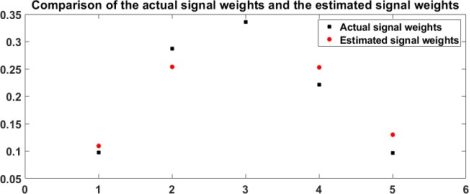
Figure 8. Comparisons of actual signal weights and the estimated signal weights.
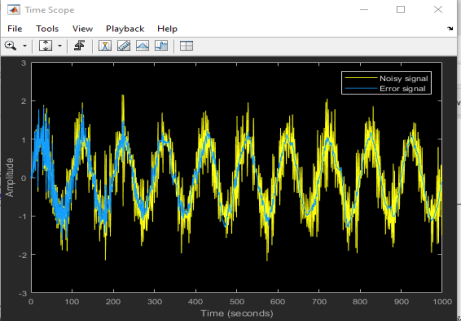
Figure 9. Simulation results of noisy signal and error signal based on system identification.
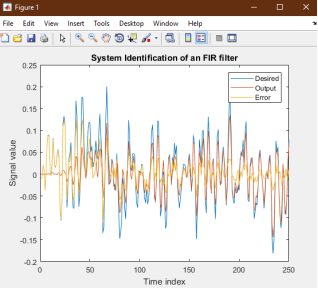
Figure 10. Simulation results of comparison of Weight.
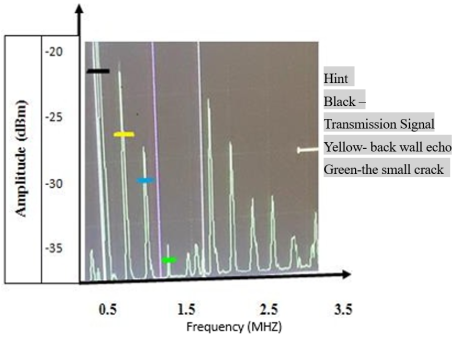
![]() Figure 11. Experimental result of standard welded sample 1 without noise.
Figure 11. Experimental result of standard welded sample 1 without noise.
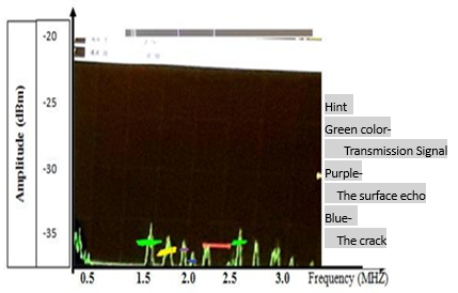
Figure 12. Experimental results 2 sample without defect with welding noise.
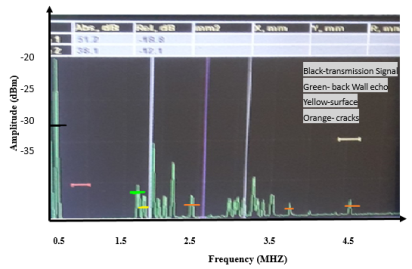
Figure 13. Experimental results 3 with running induction motor noise.
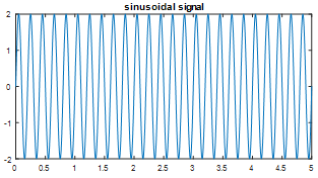
Figure 14. Original sinusoidal Signals.
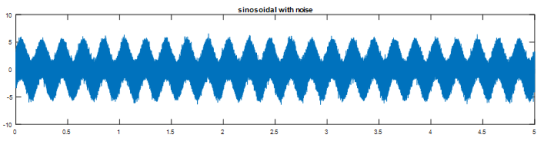
Figure 15. Simulation result of sinusoidal signal with noise.
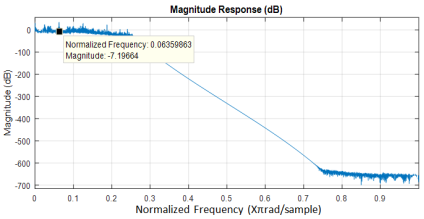
Figure 16. Simulation result of magnitude response.
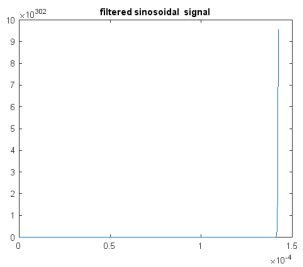
Figure 17. Simulation result of filtered sinusoidal signal.
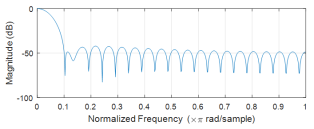
Figure 18. Simulation result of magnitude response.

Figure 19. Simulation result of phase response.
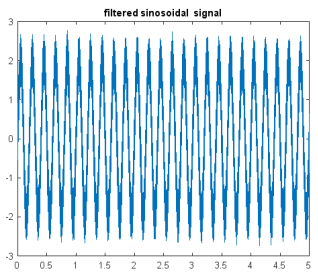
Figure 20. Simulation result of filtered sinusoidal signal.
Information

