In developing countries, researches in the areas of epidemiology, urban planning and environmental issues, it is extremely difficult to predict urban noise level in the neighborhoods. The majority of the noise-predicting algorithms in use today have limitations when it comes to prediction of noise level changes during intra-urban development and hence, the resulting noise pollution. Two hybrid noise prediction models, including ANFIS and PSO; and ANFIS and GA, were developed for Tarkwa Nsuaem Municipality and their performances were evaluated by applying statistical indicators. These hybrids were created to supplement and improve ANFIS's shortcomings based on their respective strengths and capabilities. To compare the performances of the models, statistical indicators were used; ANFIS-PSO performed better than the ANFIS-GA. The indications show the disparities, with the RMSE of ANFIS-PSO being 0.8789 and that of ANFIS-GA being 1.0529. Moreover, the Standard Deviation and Mean Square Error of ANFIS-PSO are 0.8898 and 0.7725 respectively, then those of ANFIS-GA are 1.0660 and 1.1086 respectively. A map showing the distribution of the predicted noise levels was produced from the outcome of the ANFIS-PSO model. Comparing the predicted noise levels to the EPA standards, it was observed that there is a danger which means people living in that area with noise levels above 65 dB are at high risk of health effects.
| Published in | American Journal of Mathematical and Computer Modelling (Volume 9, Issue 1) |
| DOI | 10.11648/j.ajmcm.20240901.12 |
| Page(s) | 9-21 |
| Creative Commons |
This is an Open Access article, distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution and reproduction in any medium or format, provided the original work is properly cited. |
| Copyright |
Copyright © The Author(s), 2024. Published by Science Publishing Group |
Noise Level Prediction, Noise Mapping, Dimensionality Reduction Techniques, Back Propagation Neural Network
GA Parameters | PSO Parameters | ||
|---|---|---|---|
Population Size | 25.00 | Population Size | 25.00 |
Number of Iterations | 6000 | Number of Iterations | 6000 |
Crossover Percentage | 0.400 | Inertia Weight | 1.00 |
Mutation Percentage | 0.700 | Damping Ratio | 0.9900 |
Mutation Rate | 0.1500 | Personal Learning coefficient | 2.00 |
Selection Pressure | 8.00 | Global Learning coefficient | 2.00 |
Gamma | 0.700 | ||
Selection Function | Roulette Wheel | ||
Observed | Predicted (ANFIS-GA) | Error (ANFIS-GA) | Predicted (ANFIS-PSO) | Error (ANFIS-PSO) |
|---|---|---|---|---|
65 | 65.41630058 | -0.416300584 | 64.97278921 | 0.027210787 |
78 | 78.4861043 | -0.4861043 | 78.00151625 | -0.001516252 |
84 | 84.49948506 | -0.499485065 | 84.03637167 | -0.036371667 |
84 | 83.04865152 | 0.951348484 | 84.03222463 | -0.032224632 |
75 | 76.28722363 | -1.287223634 | 75.01033216 | -0.010332155 |
86 | 85.12096869 | 0.879031308 | 85.98583698 | 0.014163017 |
88 | 88.28284329 | -0.282843295 | 87.94040493 | 0.059595068 |
86 | 84.3623735 | 1.637626502 | 85.99976757 | 0.000232427 |
89 | 88.92903289 | 0.070967108 | 88.99890955 | 0.001090453 |
91 | 90.85825006 | 0.14174994 | 91.01874005 | -0.018740052 |
98 | 98.16527733 | -0.165277335 | 98.00282511 | -0.002825113 |
96 | 96.11715327 | -0.117153271 | 95.99065219 | 0.009347805 |
94 | 94.28806248 | -0.288062477 | 93.99735276 | 0.002647244 |
83 | 83.32827922 | -0.328279218 | 82.99639568 | 0.003604322 |
81 | 81.59110691 | -0.591106909 | 80.98881564 | 0.01118436 |
85 | 85.03679159 | -0.036791592 | 85.00341319 | -0.003413193 |
75 | 74.85844092 | 0.141559081 | 75.00080234 | -0.000802335 |
76 | 74.85844092 | 1.141559081 | 75.00080234 | 0.999197665 |
74 | 74.85844092 | -0.858440919 | 75.00080234 | -1.000802335 |
77 | 77.85876307 | -0.858763074 | 77.66639021 | -0.66639021 |
74 | 73.20485074 | 0.795149257 | 73.50058324 | 0.499416764 |
73 | 73.20485074 | -0.204850743 | 73.50058324 | -0.500583236 |
86 | 86.67737944 | -0.677379445 | 85.99836246 | 0.001637539 |
84 | 84.08124288 | -0.081242879 | 84.01744742 | -0.017447423 |
89 | 92.17073144 | -3.170731445 | 91.49931191 | -2.499311914 |
87 | 85.48068017 | 1.519319826 | 86.99885897 | 0.001141027 |
90 | 91.66543967 | -1.665439669 | 91.00564811 | -1.005648113 |
95 | 95.60185074 | -0.601850735 | 95.99949385 | -0.999493847 |
98 | 96.9861982 | 1.013801796 | 96.99675252 | 1.00324748 |
97 | 95.60185074 | 1.398149265 | 95.99949385 | 1.000506153 |
87 | 87.10492428 | -0.104924275 | 87.00235696 | -0.00235696 |
89 | 88.09807936 | 0.901920636 | 89.02926001 | -0.02926001 |
93 | 93.57288251 | -0.57288251 | 93.9918187 | -0.991818698 |
95 | 93.57288251 | 1.42711749 | 93.9918187 | 1.008181302 |
94 | 92.17073144 | 1.829268555 | 91.49931191 | 2.500688086 |
96 | 96.9861982 | -0.986198204 | 96.99675252 | -0.99675252 |
92 | 91.66543967 | 0.334560331 | 91.00564811 | 0.994351887 |
88 | 87.92515813 | 0.074841874 | 87.99772451 | 0.002275495 |
80 | 77.85876307 | 2.141236926 | 77.66639021 | 2.33360979 |
76 | 77.85876307 | -1.858763074 | 77.66639021 | -1.66639021 |
68 | 68.08943448 | -0.089434479 | 67.99936318 | 0.000636823 |
Observed | Predicted (ANFIS-GA) | Error (ANFIS-GA) | Predicted (ANFIS-PSO) | Error (ANFIS-PSO) |
|---|---|---|---|---|
79 | 78.4861043 | 0.5138957 | 78.00151625 | 0.998483748 |
85 | 84.3623735 | 0.637626502 | 85.99976757 | -0.999767573 |
90 | 88.92903289 | 1.070967108 | 88.99890955 | 1.001090453 |
84 | 83.32827922 | 0.671720782 | 82.99639568 | 1.003604322 |
79 | 77.85876307 | 1.141236926 | 77.66639021 | 1.33360979 |
88 | 88.88167766 | -0.881677663 | 88.82081692 | -0.820816924 |
89 | 91.66543967 | -2.665439669 | 91.00564811 | -2.005648113 |
86 | 87.10492428 | -1.104924275 | 87.00235696 | -1.00235696 |
Mathematical Model | Statistical Performance Indices | ||
|---|---|---|---|
RMSE | MSE | SD | |
ANFIS-GA | 1.0529 | 1.1086 | 1.0660 |
ANFIS-PSO | 0.8789 | 0.7725 | 0.8898 |
Mathematical Model | Statistical Performance Indices | ||
|---|---|---|---|
RMSE | MSE | SD | |
ANFIS-GA | 1.2587 | 1.5843 | 1.3431 |
ANFIS-PSO | 1.1982 | 1.4357 | 1.2792 |
| [1] | Abraham, A. (2005), ‘Adaptation of Fuzzy Inference System Using Neural Learning’, Fuzzy Systems Engineering, Theory and Practice, Studies in Fuzziness and Soft Computing, Nedjah, Nadia, de Macedo Moureslle, Luiza (eds.), Germany, Springer Verlag, pp. 53–83. |
| [2] | Aguilera, I., Foraster, M., Basagaña, X., Corradi, E., Deltell, A., Morelli, X., Phuleria, H. C., Ragettli, M. S., Rivera, M., Thomasson, A., Slama, R. and Künzli, N. (2014), ‘Application of Land Use Regression Modelling to Assess the Spatial Distribution of Road Traffic Noise in Three European Cities’, Journal of Exposure Science & Environmental Epidemiology, Vol. 25, No. 1, pp. 97–105. |
| [3] | Alarifi, I. M., Nguyen, H. M., Naderi-Bakhtiyari, A. and Asadi, A. (2019), ‘Feasibility of ANFIS-PSO and ANFIS-GA Models in Predicting Thermophysical Properties of Al2O3-MWCNT/Oil Hybrid Nanofluid’, Materials, Vol. 12, No. 21, pp. 3628-3639. |
| [4] | Arevalo, P., Cano, A. and Jurabo, F. (2024), “Large Scale Integration of Renewable Energies by 2050 Through Demand Prediction with ANFIS, Ecuador Case Study”, Energy Journal, Vol. 286 (10), pp. 234-256. |
| [5] | Baffoe, P. E. and Duker, A. A. (2019a), ‘Evaluation of Two Noise Level Prediction Models: Multiple Linear Regression and a Hybrid Approach’, American Journal of Mathematical and Computer Modelling, Vol. 4, No. 3, pp. 91-99. |
| [6] | Baffoe, P. E. and Duker, A. A. (2019b), ‘Application of Multiple Linear Regression Technique to Predict Noise Pollution Levels and Their Spatial Patterns in the Tarkwa Mining Community of Ghana’, American Journal of Mathematical and Computer Modelling, Vol. 4, No. 2, pp. 36-44. |
| [7] | Duranoglu, D., Sinan, A. and Ilkmiv, K. (2024), “Optimization of Adaptive Neuro-Fuzzy Inference Systems (ANFIS) Parameters via Box Behnken Experimental Design Approach: The Prediction of Chromium Adsorption”, Heliyon Journal, Vol. 1016 (10), pp. 30-55. |
| [8] | Fan, B., Lin, C., Wang, F., Liu, S., Liu, L. and Xu, S. (2018), ‘An Adaptive Neuro-Fuzzy Inference System (ANFIS) Based Model for the Temperature Prediction of Lithium-Ion Power Batteries’, SAE International Journal of Passenger Cars - Electronic and Electrical Systems, Vol. 12, No. 1, pp. 187–199. |
| [9] | Gandomi, A. H., Yun, G. J., Yang, X. S., and Talatahari, S. (2013), 'Chaos-Enhanced Accelerated Particle Swarm Optimization', Communications in Nonlinear Science and Numerical Simulation, Vol. 18, No. 2, pp. 327–340. |
| [10] | Gao, W., Moayedi, H. and Shahsavar, A. (2019), ‘The Feasibility of Genetic Programming and ANFIS in Prediction Energetic Performance of a Building Integrated Photovoltaic Thermal (BIPVT) System’, Solar Energy, Vol. 183, pp. 293–305. |
| [11] | Golmohammadi, R., Abolhasannejad, V., Soltanian, A. R., Mohsen, A. and Khotanlou, H. (2018), ‘Noise Prediction in Industrial Workrooms Using Regression Modelling Methods Based on the Dominant Frequency Cut-off Point’, Australian Acoustical Society, Vol. 46, pp. 269-280. |
| [12] | Jang, J. S. R. (1993), ‘ANFIS: Adaptive-Network-Based Fuzzy Inference System’, IEEE Transactions on Systems, Man and Cybernetics, Vol. 23, No. 3, pp. 665–685. |
| [13] | Karaboga, D. and Kaya, E. (2019), ‘Adaptive Network Based Fuzzy Inference System (ANFIS) Training Approaches: A Comprehensive Survey’, Artificial Intelligence Review, Vol. 52, pp. 2263–2293. |
| [14] | Kennedy, J. and Eberhart, R. (1995), ‘Particle swarm optimization’, Proceedings of the IEEE International Conference on Neural Networks, Perth, WA, Australia, pp. 1942–1948. |
| [15] | Li, F., Xue, W., Rong, Y., Du, C., Tang, J., and Zhao, Y. (2022), ‘A Probability Distribution Prediction Method for Expressway Traffic Noise’, Journal of Transport and Environment, Vol. 103, pp. 103175. |
| [16] | Liu, X. and Zhou, Z. (2017), ‘A Novel Prediction Model Based on Particle Swarm Optimization and Adaptive Neuro-Fuzzy Inference System’, Journal of Intelligent and Fuzzy Systems, Vol. 33, No. 5, pp. 3137-3143. |
| [17] | Mikaeil, R., Piri, M., Shaffiee Haghshenas, S., Careddu, N., Hashemolhosseini, H. (2022), ‘An Experimental-Intelligent Method to Predict Noise Value of Drilling in Dimension Stone Industry’, Journal of Mining, Vol. 13, pp. 693–713. |
| [18] | Mensah, P. (2018), ‘A Hybrid Model of Principal Component Analysis and Back Propagation Neural Network for Noise Prediction’, Unpublished BSc Project Report, University of Mines and Technology, Tarkwa, 38pp. |
| [19] | Naqvi, S. L. H., Ayub, F., Yasar, A., Tabinda, A. B., Nawaz, H., and Tanver, R. (2023), ‘Pollution Status Monitoring and Indices Development for Evaluating Sustainable Environmental Management Practices (SEMP) in Quaid-E-Azam Industrial Estate, Pakistan’, Journal of Cleaner Production, Vol. 45, pp. 124-139. |
| [20] | Nobile, M. S., Cazzaniga, P., Besozzi, D., Colombo, R., Mauri, G. and Pasi, G. (2018), ‘Fuzzy Self-Tuning PSO: A Settings-Free Algorithm for Global Optimization’, Swarm and Evolutionary Computation, Vol. 39, pp. 70–85. |
| [21] | Radwan, M. M., and Oldham, D. J. (1987), 'The Prediction of Noise from Urban Traffic Under Interrupted Flow Conditions. Applied Acoustics, Vol. 21, No. 2, pp. 163–185. |
| [22] | Rao, P. and Rao, S. (1991), ‘Prediction of LAT Traffic Noise Levels in the City of Visakhapatnam India’, Applied Acoustics, Vol. 34, pp. 101–110. |
| [23] | Sharifi, A., Harati, A. and Vahedian, A. (2017), ‘Marker-Based Human Pose Tracking Using Adaptive Annealed Particle Swarm Optimization with Search Space Partitioning’, Image Vision Computing, Vol. 62, pp. 28–38. |
| [24] | Singh, D., Francavilla, A. B., Mancini, S., and Guarnaccia, C. (2021), ‘Application of Machine Learning to Include Honking Effect in Vehicular Traffic Noise Prediction’, Applied Sciences, Vol. 11 (13), pp. 6030-6046. |
| [25] | Singh, D., Upadyay, R., Singh, H. P., and Leray, D. (2021), ‘Development of an Adaptive Neuro Fuzzy Inference System Based Vehicular Traffic Noise Prediction Model’, Journal of Ambient Intelligence and Humanized Computing, Vol. 12, pp. 2685-2701. |
| [26] | Yadav, A., Mandhani, I., Porida, M., and Kumar, B. (2022), ‘Modelling Traffic Noise in the Vicinity of Urban Road Intersections’, Journal of Transport and Environment, Vol. 112, pp. 1-16. |
| [27] | Zafar, M., Aggarwal A., Rene, E. R., Barbusinski, K., Mahanty, B., Behera, S. K. (2022), “Data-driven Machine Learning Intelligent Tools for Predicting Chromium Removal in an Adsorption System. Processes. 2022; 10: 447. |
| [28] | Zhang, K., Hu, Z., Gan, X. T. and Fang, J. B. (2016), ‘A Network Traffic Prediction Model Based on Quantum-Behaved Particle Swarm Optimization Algorithm and Fuzzy Wavelet Neural Network’, Discrete Dynamics in Nature and Society, Vol. 2016, pp. 1-11. |
| [29] | Zhang, L., Liu, J., Lai, J. and Xiong, Z. (2014), ‘Performance Analysis of Adaptive Neuro Fuzzy Inference System Control for MEMS Navigation System’, Mathematical Problems in Engineering, Vol. 2014, pp. 1–7. |
| [30] | Zhang, Z., Al-Bahrani M., Ruhani B., Ghalehsalimi H. H., Ilghani N. Z., Maleki, H., Ahmad, N., Nasajpour-Esfahani, N., Toghraie, D. (2023), “Optimized ANFIS Models Based on Grid Partitioning, Subtractive Clustering, and Fuzzy C-means to Precise Prediction of Thermophysical Properties of Hybrid Nanofluids. Chem. Eng. J. 2023; 471. |
APA Style
Baffoe, P. E., Boye, C. B. (2024). A Hybrid Intelligent Noise Pollution Prediction Model Based on ANFIS and Nature-Inspired Algorithms. American Journal of Mathematical and Computer Modelling, 9(1), 9-21. https://doi.org/10.11648/j.ajmcm.20240901.12
ACS Style
Baffoe, P. E.; Boye, C. B. A Hybrid Intelligent Noise Pollution Prediction Model Based on ANFIS and Nature-Inspired Algorithms. Am. J. Math. Comput. Model. 2024, 9(1), 9-21. doi: 10.11648/j.ajmcm.20240901.12
@article{10.11648/j.ajmcm.20240901.12,
author = {Peter Ekow Baffoe and Cynthia Borkai Boye},
title = {A Hybrid Intelligent Noise Pollution Prediction Model Based on ANFIS and Nature-Inspired Algorithms
},
journal = {American Journal of Mathematical and Computer Modelling},
volume = {9},
number = {1},
pages = {9-21},
doi = {10.11648/j.ajmcm.20240901.12},
url = {https://doi.org/10.11648/j.ajmcm.20240901.12},
eprint = {https://article.sciencepublishinggroup.com/pdf/10.11648.j.ajmcm.20240901.12},
abstract = {In developing countries, researches in the areas of epidemiology, urban planning and environmental issues, it is extremely difficult to predict urban noise level in the neighborhoods. The majority of the noise-predicting algorithms in use today have limitations when it comes to prediction of noise level changes during intra-urban development and hence, the resulting noise pollution. Two hybrid noise prediction models, including ANFIS and PSO; and ANFIS and GA, were developed for Tarkwa Nsuaem Municipality and their performances were evaluated by applying statistical indicators. These hybrids were created to supplement and improve ANFIS's shortcomings based on their respective strengths and capabilities. To compare the performances of the models, statistical indicators were used; ANFIS-PSO performed better than the ANFIS-GA. The indications show the disparities, with the RMSE of ANFIS-PSO being 0.8789 and that of ANFIS-GA being 1.0529. Moreover, the Standard Deviation and Mean Square Error of ANFIS-PSO are 0.8898 and 0.7725 respectively, then those of ANFIS-GA are 1.0660 and 1.1086 respectively. A map showing the distribution of the predicted noise levels was produced from the outcome of the ANFIS-PSO model. Comparing the predicted noise levels to the EPA standards, it was observed that there is a danger which means people living in that area with noise levels above 65 dB are at high risk of health effects.
},
year = {2024}
}
TY - JOUR T1 - A Hybrid Intelligent Noise Pollution Prediction Model Based on ANFIS and Nature-Inspired Algorithms AU - Peter Ekow Baffoe AU - Cynthia Borkai Boye Y1 - 2024/05/17 PY - 2024 N1 - https://doi.org/10.11648/j.ajmcm.20240901.12 DO - 10.11648/j.ajmcm.20240901.12 T2 - American Journal of Mathematical and Computer Modelling JF - American Journal of Mathematical and Computer Modelling JO - American Journal of Mathematical and Computer Modelling SP - 9 EP - 21 PB - Science Publishing Group SN - 2578-8280 UR - https://doi.org/10.11648/j.ajmcm.20240901.12 AB - In developing countries, researches in the areas of epidemiology, urban planning and environmental issues, it is extremely difficult to predict urban noise level in the neighborhoods. The majority of the noise-predicting algorithms in use today have limitations when it comes to prediction of noise level changes during intra-urban development and hence, the resulting noise pollution. Two hybrid noise prediction models, including ANFIS and PSO; and ANFIS and GA, were developed for Tarkwa Nsuaem Municipality and their performances were evaluated by applying statistical indicators. These hybrids were created to supplement and improve ANFIS's shortcomings based on their respective strengths and capabilities. To compare the performances of the models, statistical indicators were used; ANFIS-PSO performed better than the ANFIS-GA. The indications show the disparities, with the RMSE of ANFIS-PSO being 0.8789 and that of ANFIS-GA being 1.0529. Moreover, the Standard Deviation and Mean Square Error of ANFIS-PSO are 0.8898 and 0.7725 respectively, then those of ANFIS-GA are 1.0660 and 1.1086 respectively. A map showing the distribution of the predicted noise levels was produced from the outcome of the ANFIS-PSO model. Comparing the predicted noise levels to the EPA standards, it was observed that there is a danger which means people living in that area with noise levels above 65 dB are at high risk of health effects. VL - 9 IS - 1 ER -
Geomatic Engineering Department, University of Mines and Technology, Tarkwa, Ghana
Geomatic Engineering Department, University of Mines and Technology, Tarkwa, Ghana
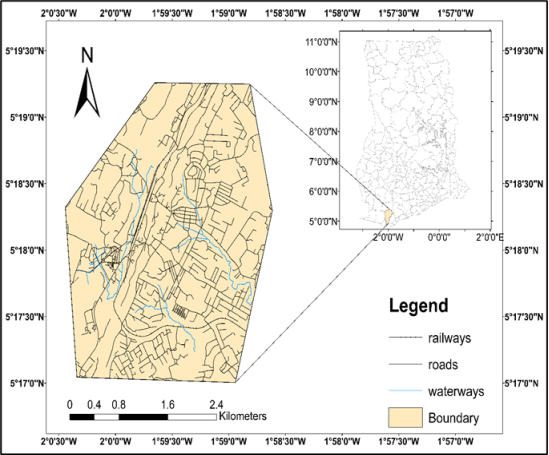
Figure 1. Tarkwa Nsuaem Municipality of Ghana.
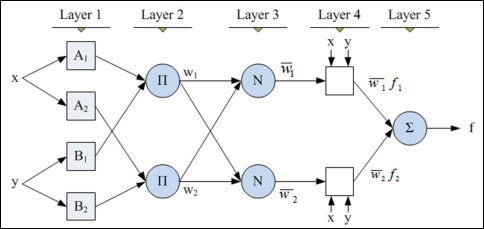
Figure 2. Structural Form of ANFIS.
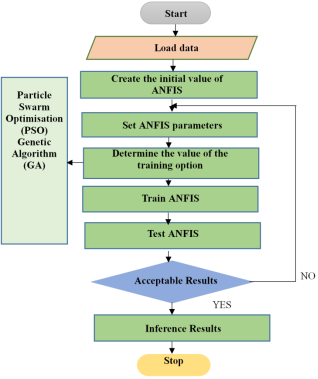
Figure 3. Process of ANFIS Training.
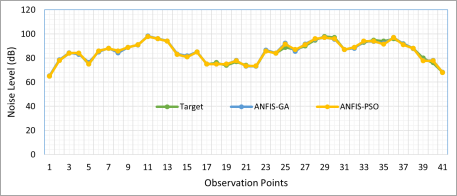
Figure 4. Trend of Noise Level Yielded by both Prediction Models for Training Data.
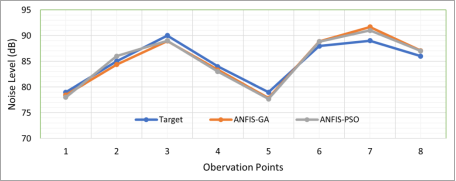
Figure 5. Trend of Noise Level Yielded by both Prediction Models for Testing Data.
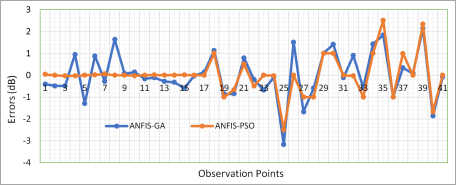
Figure 6. Errors Trend Generated from the Predictions Models for Training Data.
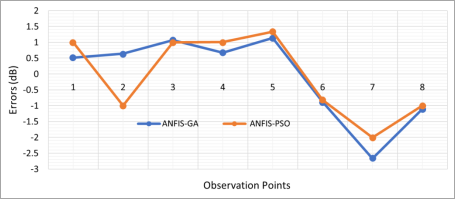
Figure 7. Error Trend Generated from the Predictions Models for Testing Data.
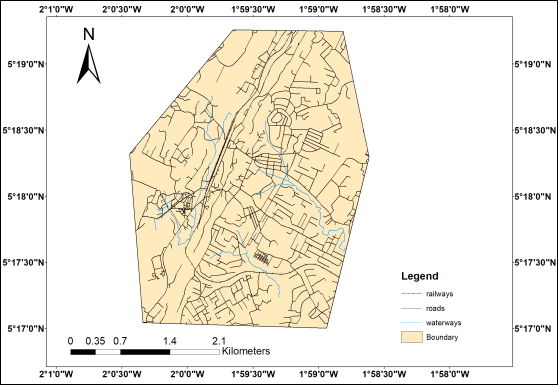
Figure 8. Area of Study before Prediction.
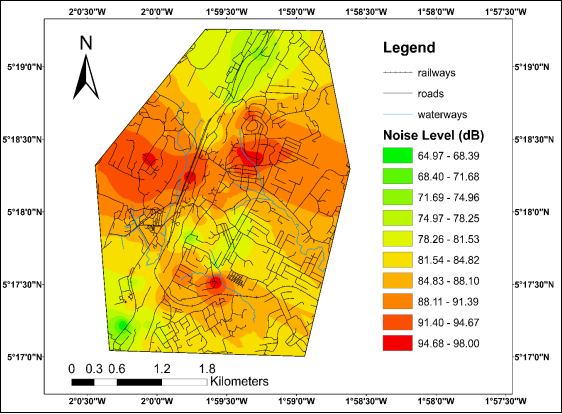
Figure 9. Area of Study after Prediction.
Information

